The IMO inertial sensors motion analysis software is easy to use, cost efficient for full-body human motion analysis. The IMO develop the kinematic analysis algorithm to provide detailed parameters of human movement, body segment kinematic data and range of motion of whole body, and export the csv file reports. When applying to gait analysis, IMO can automatically detect the gait cycle and have kinematic data in related phase. Besides, IMO can support all the inertial motion capture system of the market.
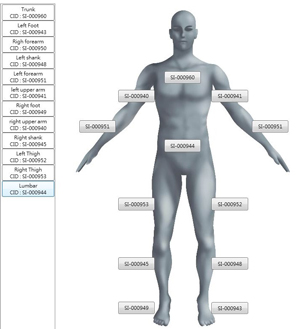

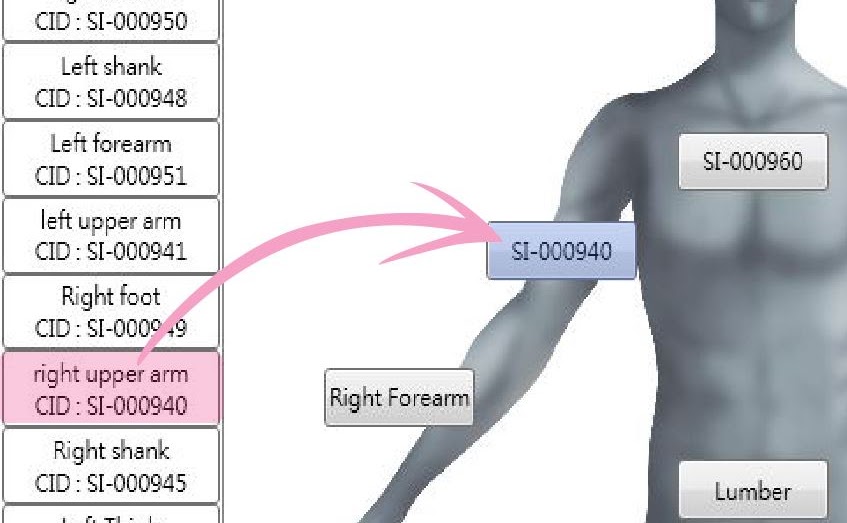
IMO is a high compatible inertial sensors motion analysis software, it can support any marker-set of the market, you donʼ t need to change your original setting of experiments. Using IMO to analyze your data, you just need to input the measured data from the inertial motion capture system into IMO, drag the selected sensors to the corresponding position of the human model, and set the coordination system of experiment setting to define the movement of subjects and complete the settings.
After you set the position of sensors, IMO conduct the Euler calculation to output numerical value of each body segment. IMO will automatically determine quaternion rotation sequence, and the outcome display the chart and saved as csv file. When applying to gait analysis, IMO can detect heel strike of gait cycle by gait analysis function.
Using IMOʼ s gait analysis function, it can show detailed kinematic parameters such as range of motion of full body joints, cadence, and stride length during Heel Strike phase in the gait cycle. You can enhance the efficiency of analysis by IMO software.
With the MEMS technological development, the accuracy of inertial sensors improves, so the inertial sensors become one of the choice of more people in motion capture system. The inertial motion capture systems compared with optical motion capture systems is easier to set up, less space constraints, and more portable. So the inertial motion capture system combine with the inertial motion analysis software can greatly enhance the efficiency of the experiment.
An inertial measurement unit is an electronic device that measures and reports a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes, sometimes also magnetometers.
